UAV-Based Maritime Object Tracking: A New Data Set and Dynamic Multi-scale Fusion Transformer
|
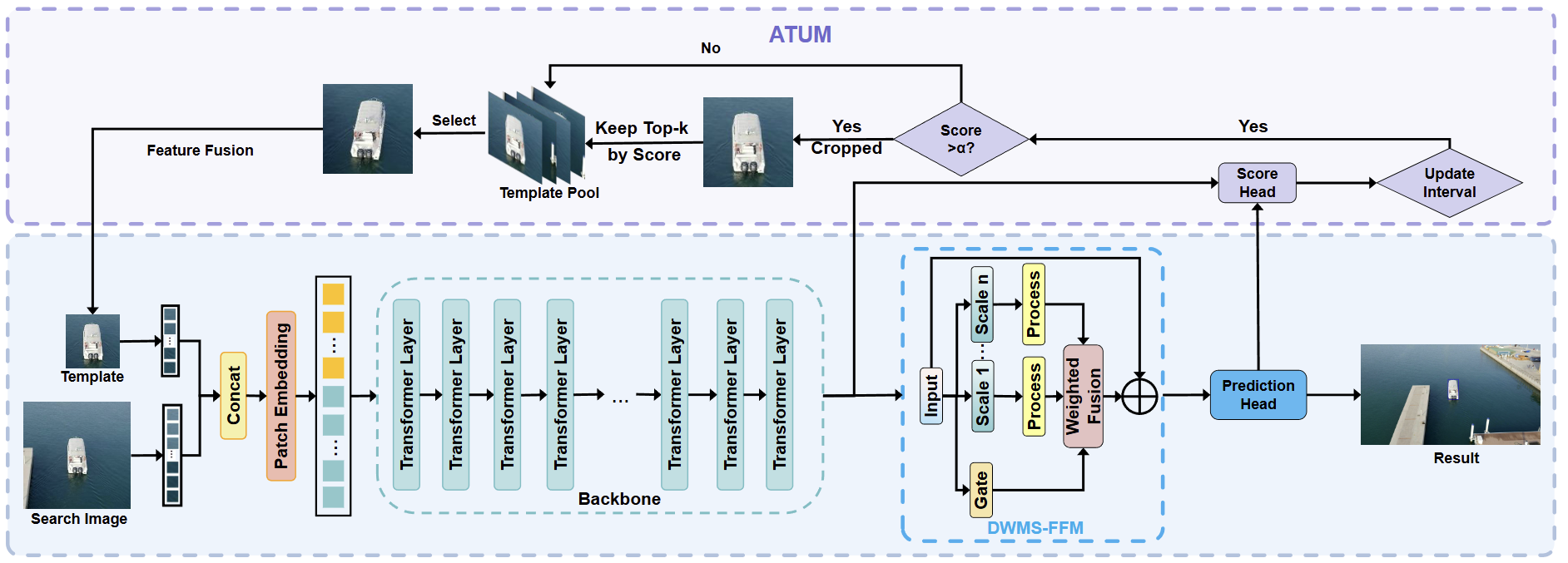
The architecture of the proposed DMFTrack.

|
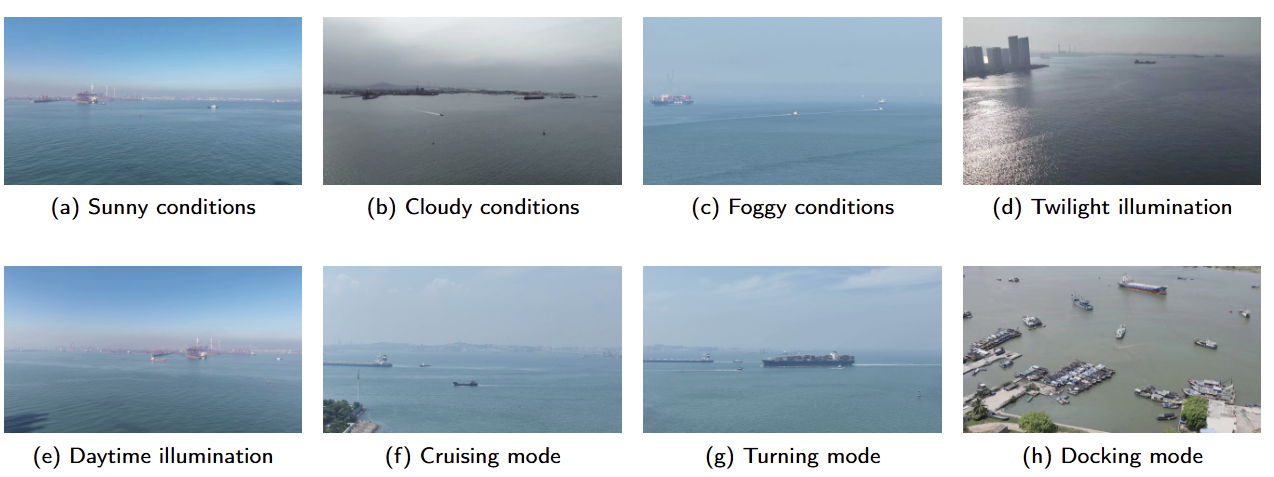
Eight sequence examples contained in UAVSeaShip102, captured under different weather conditions, illuminations and motion patterns.
|
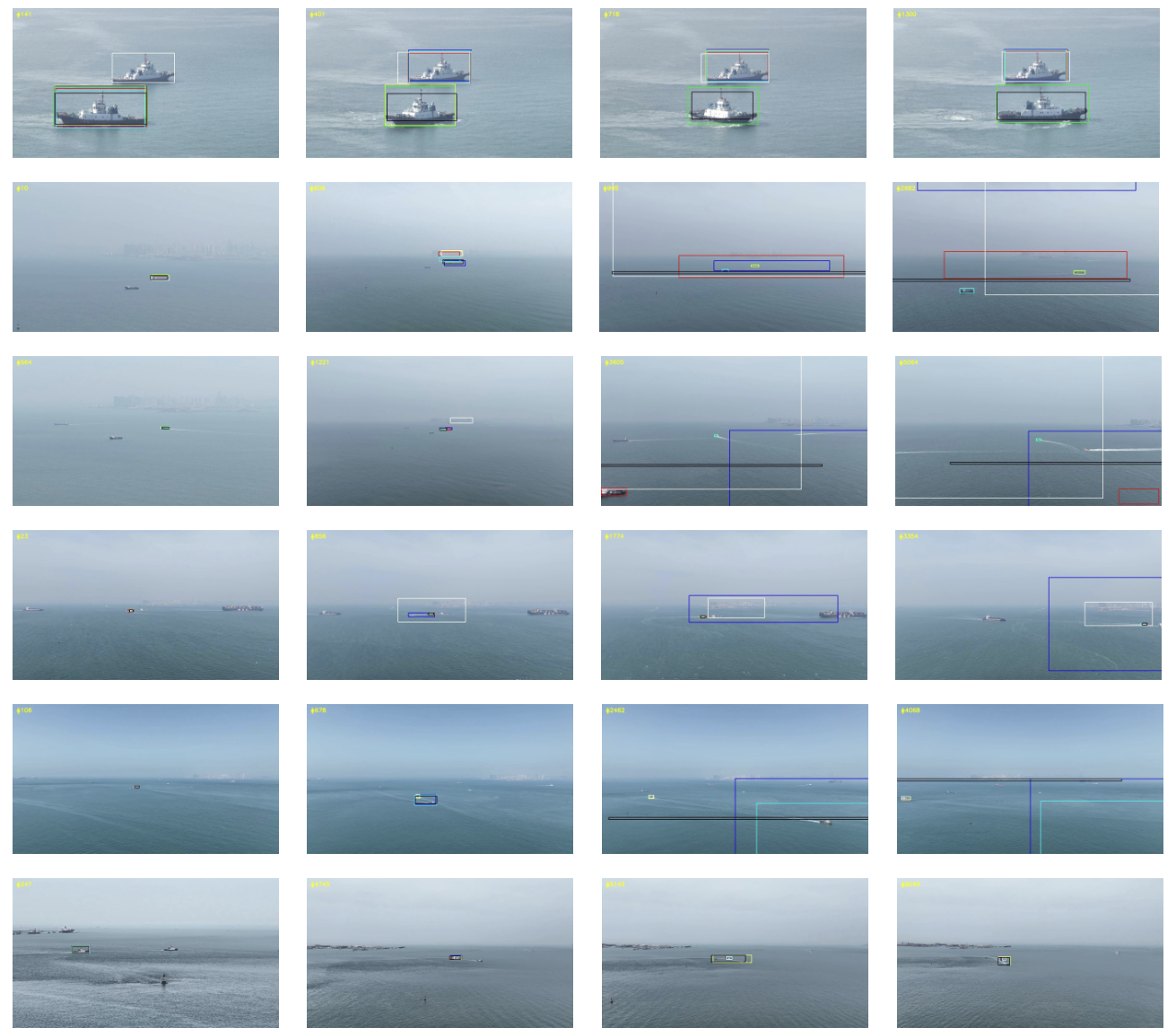
Visualization of the results of our tracker and six state-of-the-art baselines on six challenging sequences contained in our UAVSeaShip102 data set, including Ship0010, Ship0029, Ship0030, Ship0034, Ship0035 and Ship0043 (from top to bottom).
|
| |
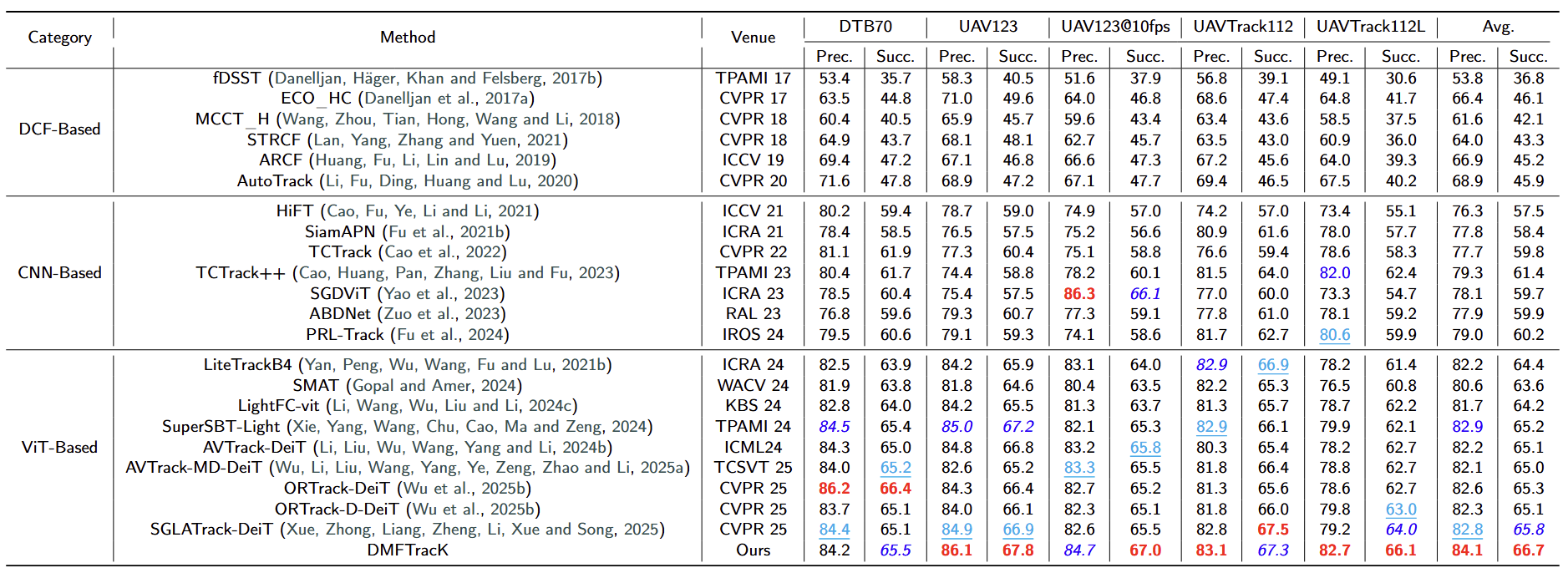
Comparison between our method and 22 state-of-the-art lightweight trackers in terms of the precision and Success Rate metrics on the test sets of DTB70, UAV123, UAV123@10fps, UAVTrack112 and UAVTrack112L. In addition, the average metric values computed across the five data sets are presented in the column of “Avg.”. Here, the top three results derived in each case are highlighted in the red, blue and cyan fonts, respectively.